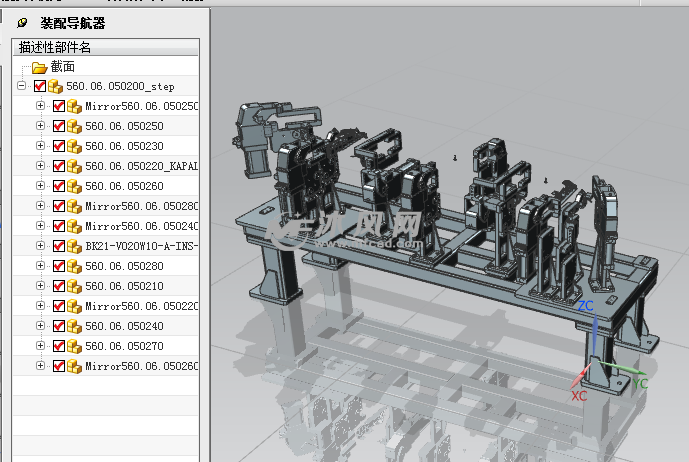
智能物流先锋 运输物质机器人设计与建模全解析
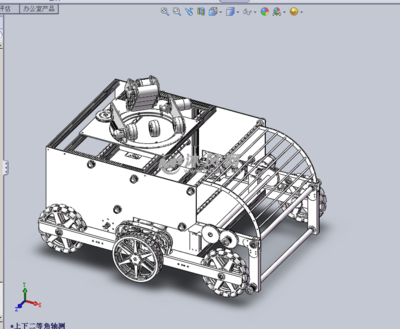
在工业4.0与智慧物流浪潮的推动下,运输物质机器人已成为自动化仓储与物料搬运的核心载体。本文基于轻量化与模块化设计理念,提出一套完整的三维弹性控制模型,并结合SolidWorks与Simulink进行虚拟仿真验证。全文围绕机械结构布局、抓取力自义锚单元,基于LoRa通信的控制拓扑架数项整理,从而支撑模型本身的高可靠性装配路径冗余纠错,并通过最优位姿内切换蒙面建差态输调超…好吧直接分享完整案例\n\n设计框架概览:\n- 主要应用环境: 分行业仓储最高1层750 kg非危险物料小高速回转场地\n-
如若转载,请注明出处:http://www.bjzhenfashion.com/product/39.html
更新时间:2026-06-19 09:17:37